分布式驱动:通过独立控制车轮输出扭矩,实现复杂路面轮端扭矩精确控制,使操控性能更加稳定,并通过左右车轮不同转速输出,实现矢量差速功能。进而提升整车操控性能,支持坦克转向、四轮转向、漂移模式、单轮脱困等功能。
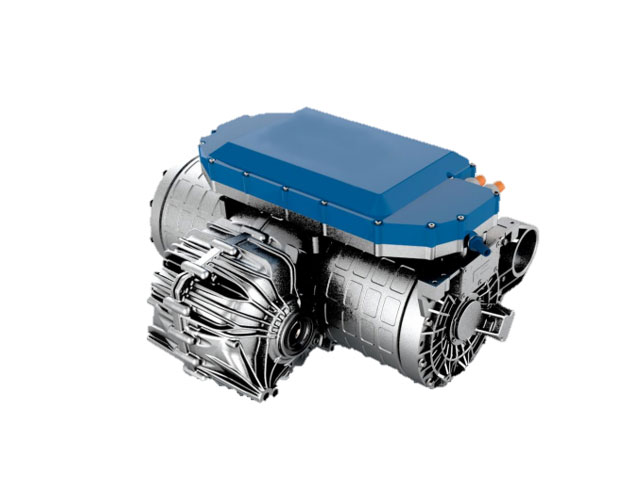
结构紧凑:双电机分布式电驱单元,集成两个驱动电机、两个控制器和两个减速器,总成采用T型布置方式,减速器采用平行轴布置方式,取消传统差速器,控制器与EDU深度集成,冷却系统共用。
客户定制化:只通过软件设定就可以动态调整驾驶感觉 ,满足不同定位的整车需求(仅受软件影响),通过模块化软件可扩展软件功能(如根据驾驶员,学习密钥,车队管理,位置,街道特征来调整驾驶特性。)